
A quadcopter (or “quad”) is a multirotor UAV rocking four motors. Forget helicopters and their messy “swashplates”—drones keep it simple and brutal by just cranking motor speeds up or down.
The Core Hardware:
-
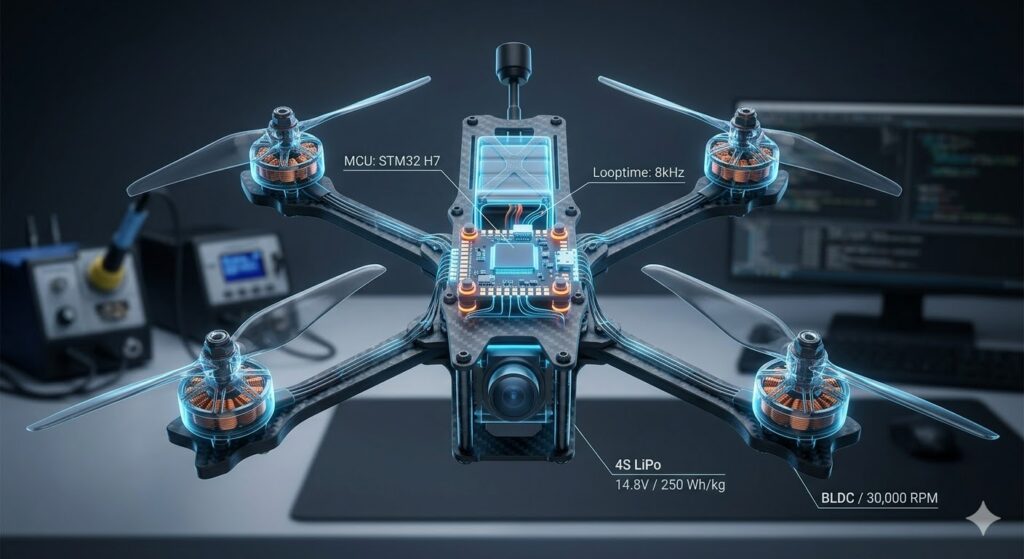
The Frame: Usually high-grade T700 Carbon Fiber. It’s the skeleton, and it usually accounts for about 18% of the total “all-up weight” (AUW).
-
Flight Controller (FC): The brain. We’re talking ARM Cortex-M7 processors hitting clock speeds of 480 MHz. It’s crunching sensor data 8,000 times a second (8kHz looptime).
-
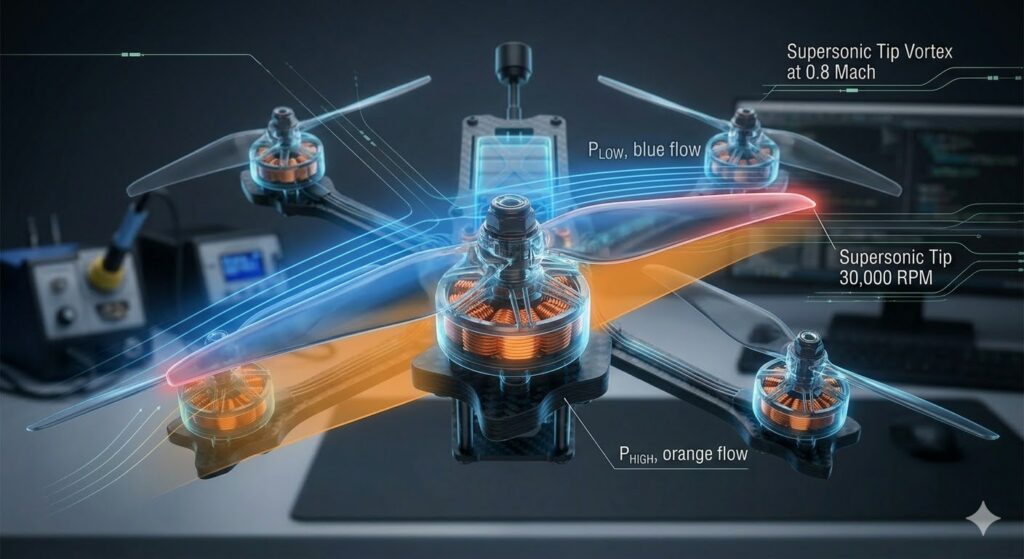
Brushless Motors (BLDC): These things are beasts. They hit 92% efficiency and can spin at over 30,000 RPM.
-
ESCs (Electronic Speed Controllers): These talk to the motors via DShot1200 protocols at 1.2 Mbps. That’s lightning-fast communication.
Pro Tip: LiPo Batteries
A standard cell is 3.7V. Most pro rigs run 6S setups (22.2V). We’re looking at an energy density of 250 Wh/kg. That’s double what your old-school lead-acid battery could ever dream of.
Chapter 2. Aerodynamics: Why Doesn’t It Just Fall?
It’s all Newton’s Third Law, man. The props shove a massive column of air down, and the air shoves the drone up.
Staying Locked In
To keep the drone from spinning like a top, we split the motors into pairs:
-
Two motors spin Clockwise (CW).
-
Two motors spin Counter-Clockwise (CCW).
The “Cheat Sheet” for Flight Control:
| Command | What the Motors Do | The Result |
| Throttle (Punch it) | All 4 motors ramp up 10-15% | Straight up vertical climb |
| Yaw (Spin) | Speed up CW, slow down CCW | Spins on a dime via torque |
| Pitch (Lean) | Back motors +10%, Front -10% | Tips the nose down and hauls ass forward |
| Roll (Bank) | Left motors +10%, Right -10% | Tilts and slides to the right |

Expert Take:
“Stability is just a math problem. We use PID loops to fix the drone’s attitude every 125 microseconds. That’s why you can hover with a precision of 5-10 mm, even when the wind is trying to kick your teeth in.”
— Marcus Schmidt, Lead Systems Engineer at Volocopter GmbH (Germany)
Chapter 3. The Specs and the Physics of Weight
In this game, the Thrust-to-Weight ratio is king.
-
For a chill hover: You need at least a 2:1 ratio. If your rig weighs 1,000g, your motors better pump out 2,000g of thrust.
-
Racing Quads: These monsters hit 12:1. We’re talking 0 to 100 mph in 1.9 seconds. That’s faster than a Tesla Plaid.
Efficiency and Lift
The lift (L) comes down to how much air you move:
L = 1/2 * ρ * v² * S * Cl
Where:
-
ρ (rho) — air density (approx. 1.225 kg/m³)
-
v — velocity of the air flow (prop speed)
-
S — surface area of the prop disc
-
Cl — lift coefficient
Expert Take:
“Propeller geometry is where the magic happens. By tweaking the pitch, we can squeeze 15% more flight time out of a pack. We use composites that don’t flex even at 20,000 RPM—that’s how you stay locked in during a high-G turn.”
— Jonathan Reed, Head of Aero at Skydio (USA)
The Bottom Line: How It All Blends Together
A quadcopter is basically a “flying brick” that only stays up because the software is smarter than gravity.
-
Speed: The system reacts 100x faster than a human blink.
-
Precision: It uses IMU sensors to track acceleration across 3 axes.
-
Juice: High-discharge batteries that can dump 100 Amps instantly.
Right now, a tiny 249g drone can handle 23 mph winds and stay up for 34 minutes. That’s straight-up sci-fi.

